Results
This section will go over the results achieved so far.
This image shows the quadcopter used, which has a Hokuyo 2D LiDAR and monocular camera:

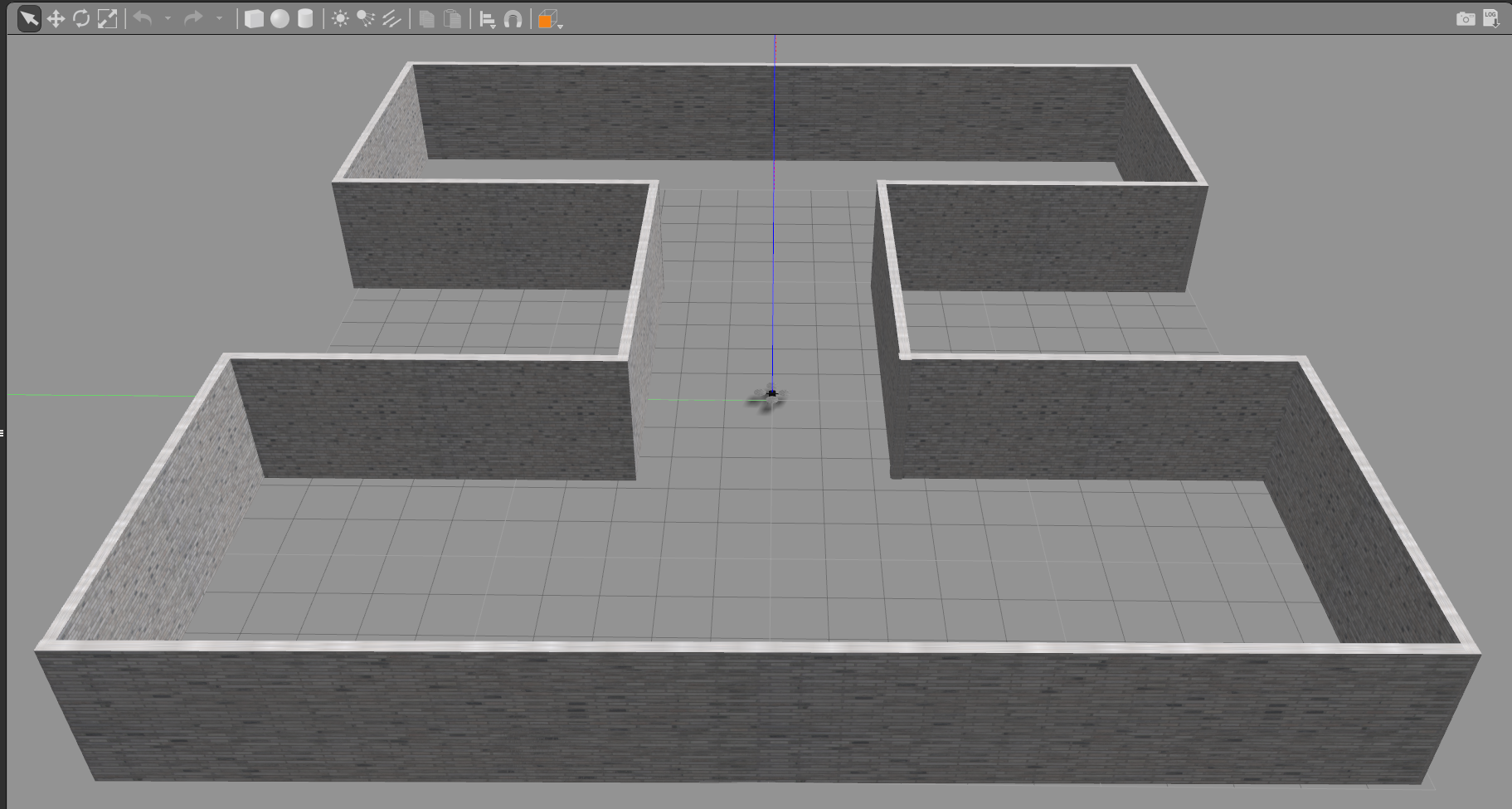
This image shows the simple indoor environment built for the project:
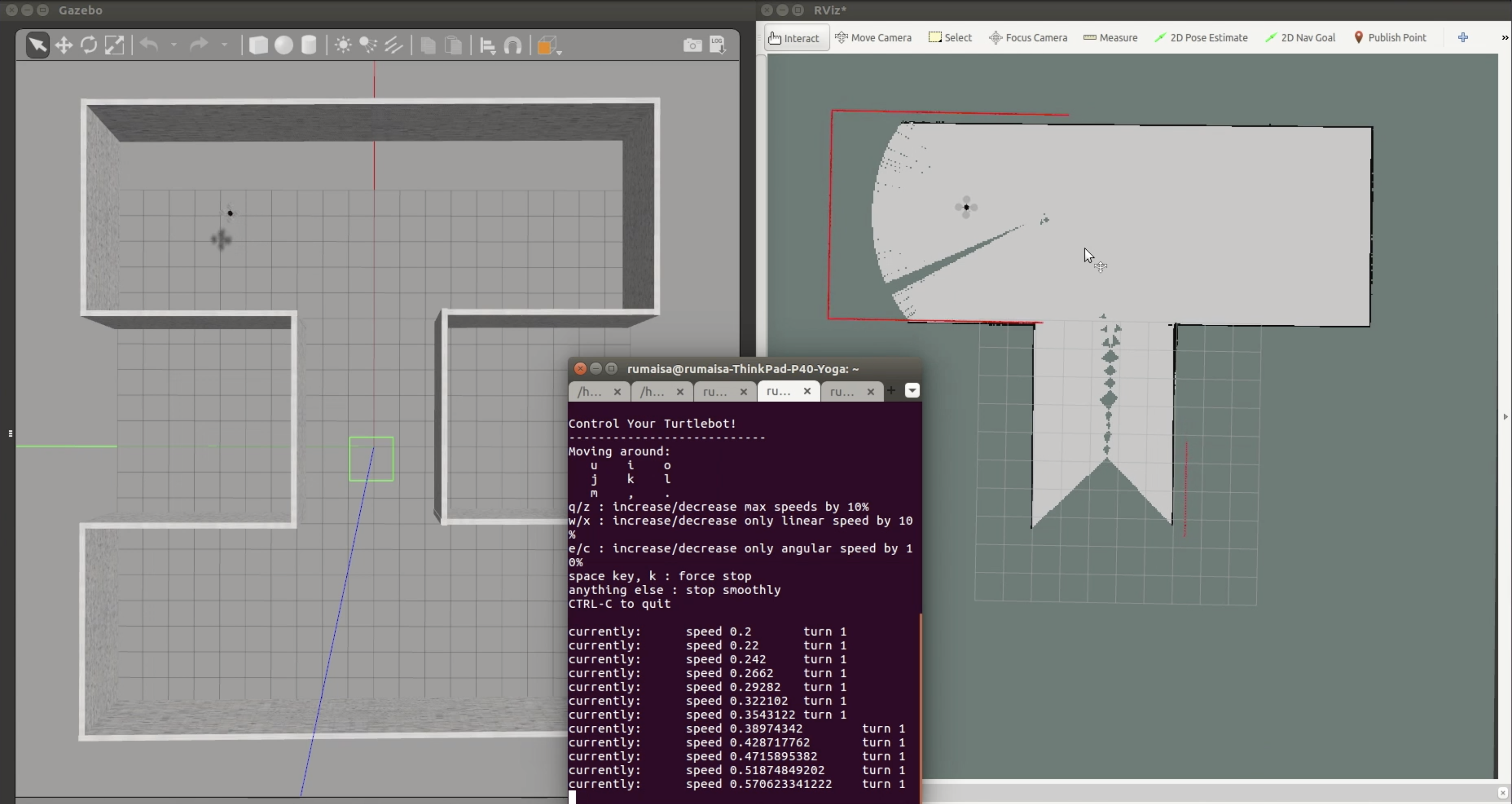
This image shows a snapshot of the mapping process using GMapping and teleop:
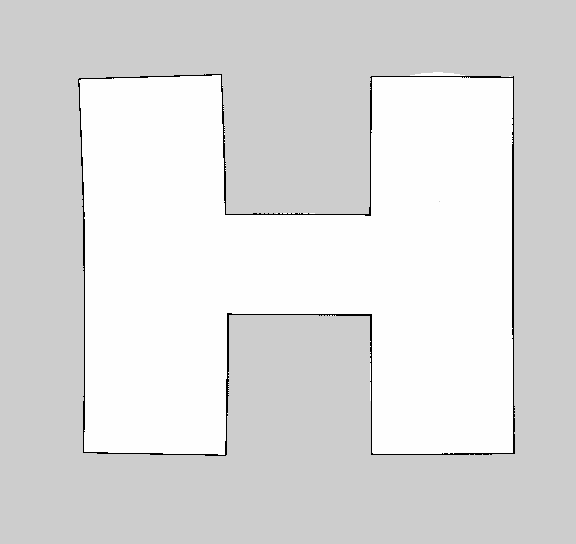
This image shows the resulting map created of the simple indoor environment:
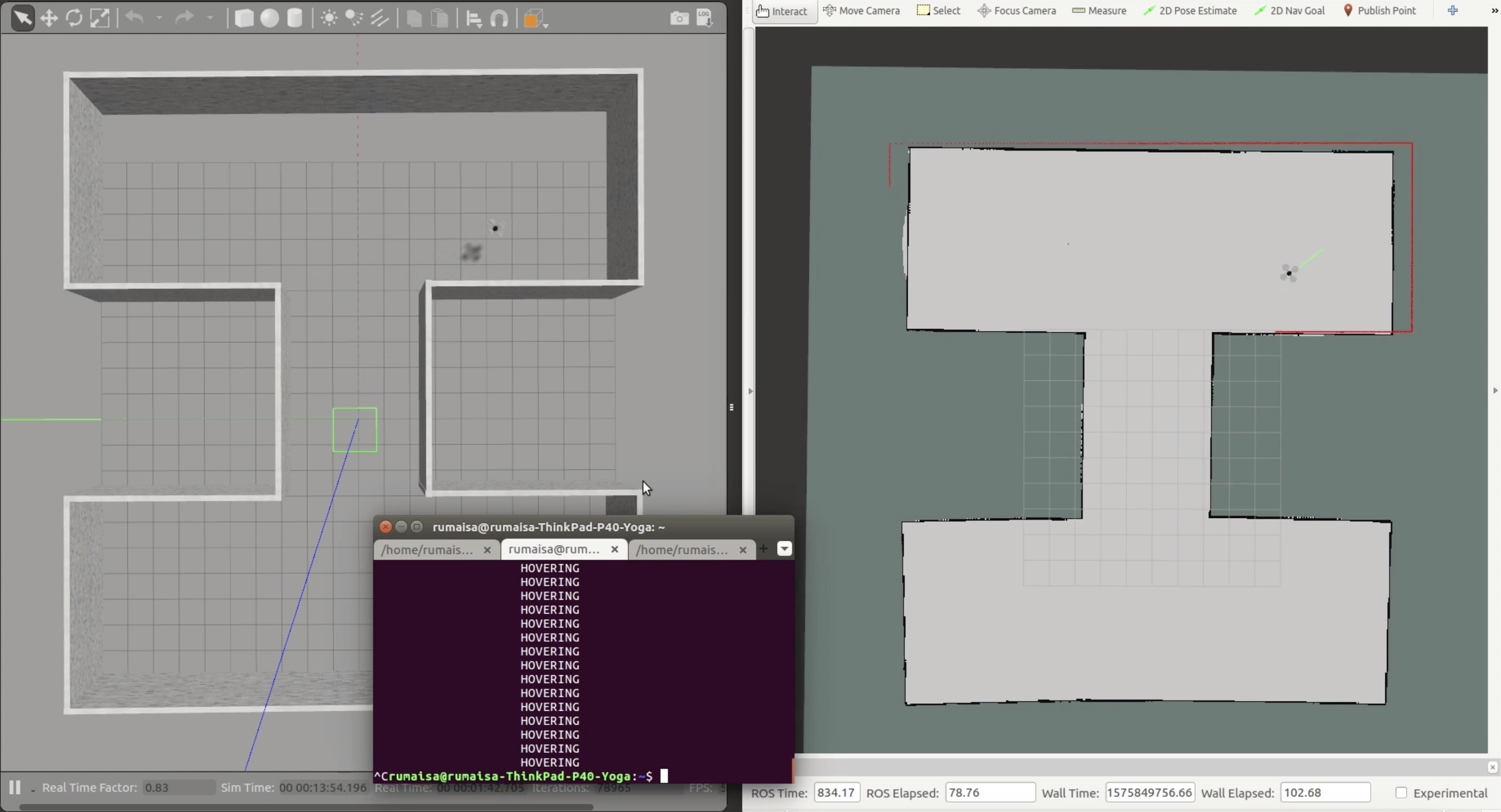
This image shows the drone navigating to the goal:
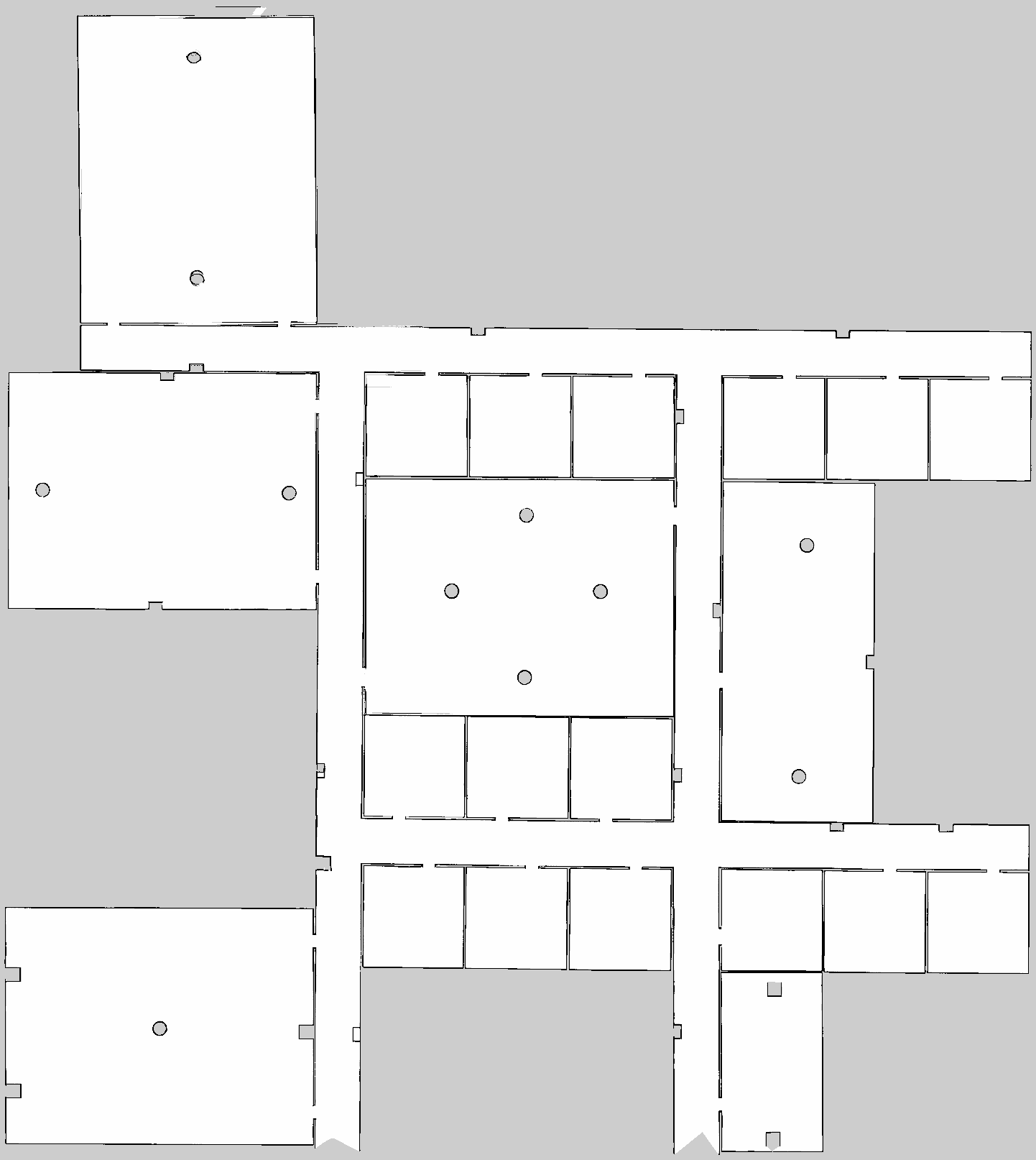
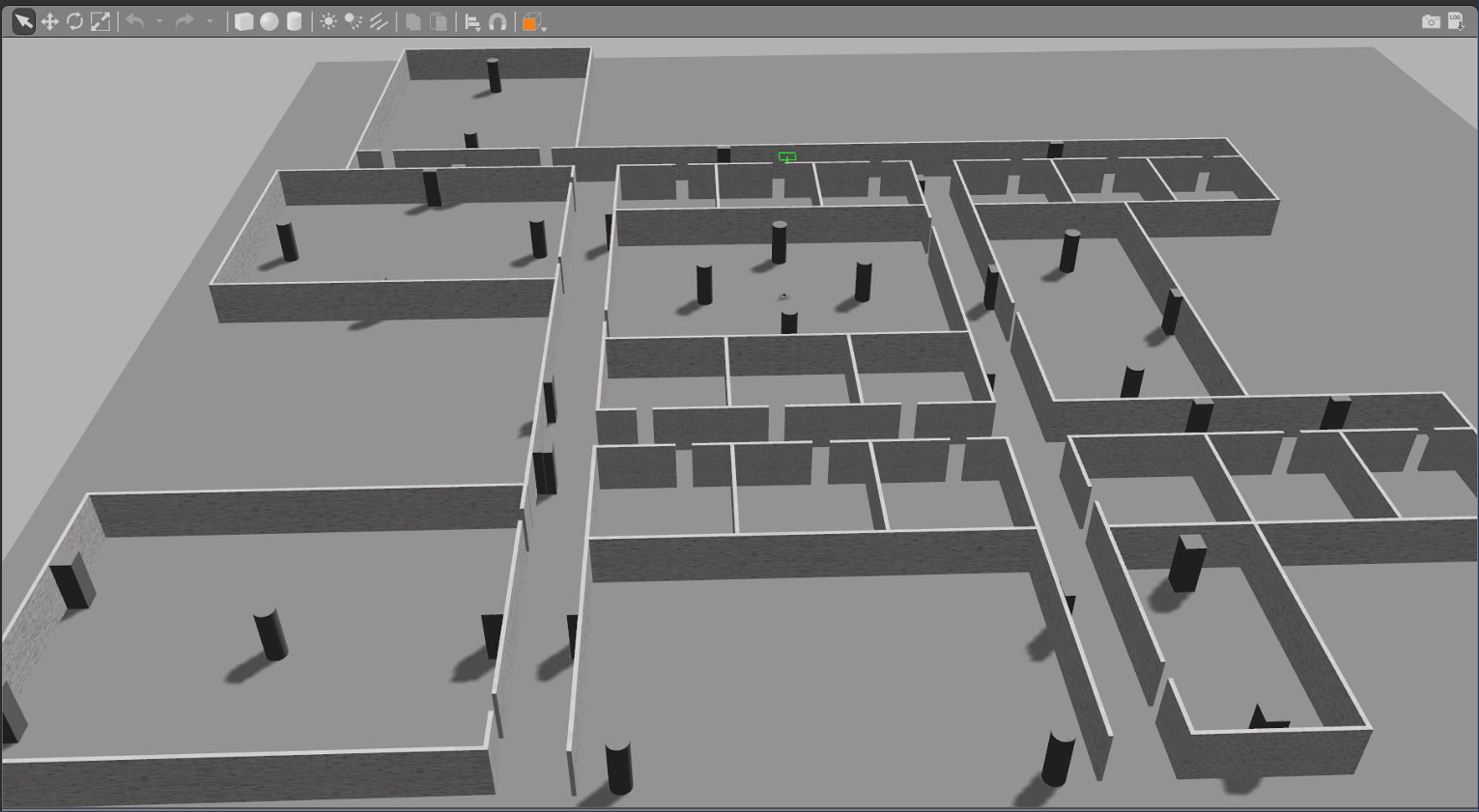
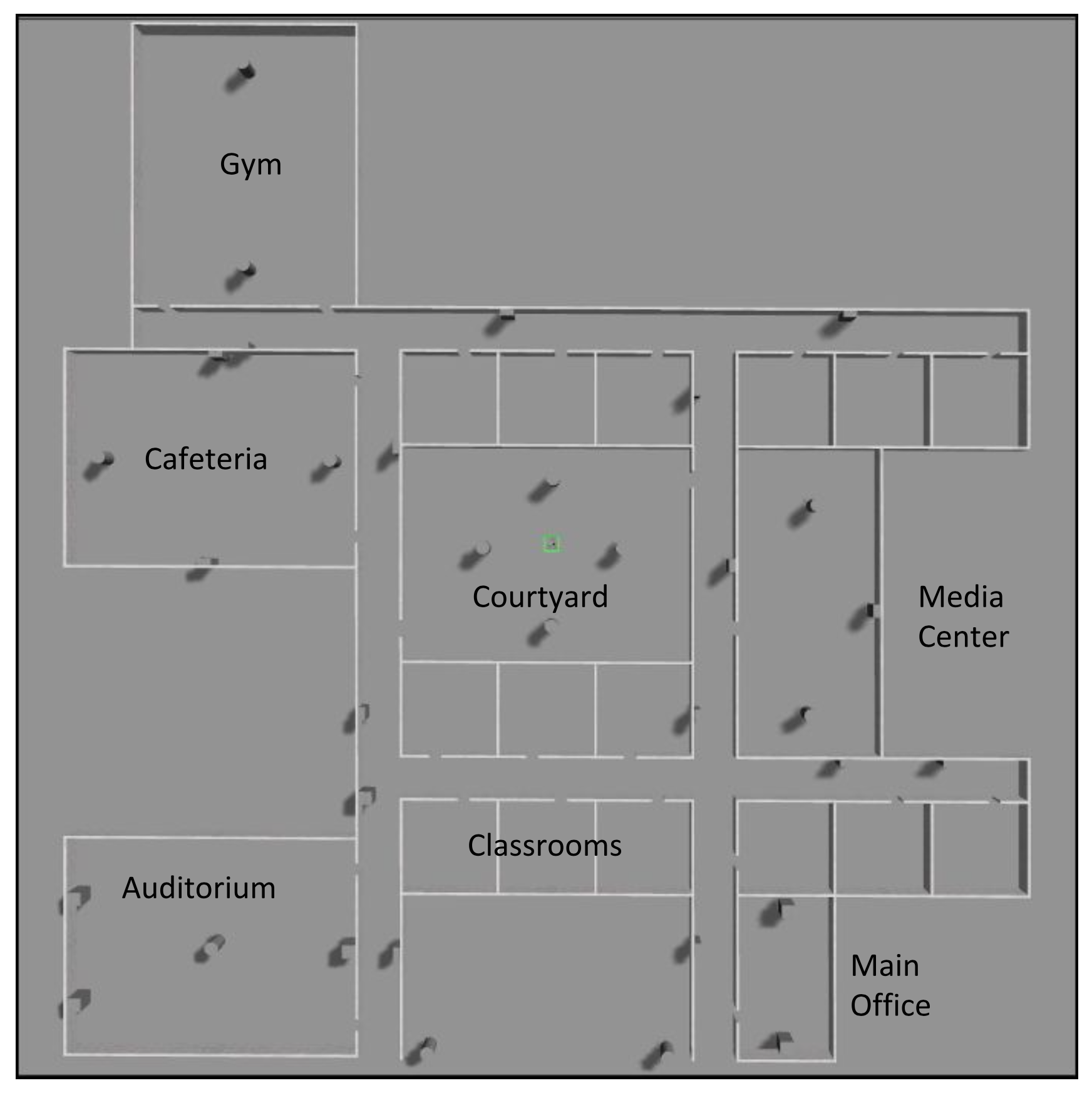
These images show the complex indoor school environment built for the project:
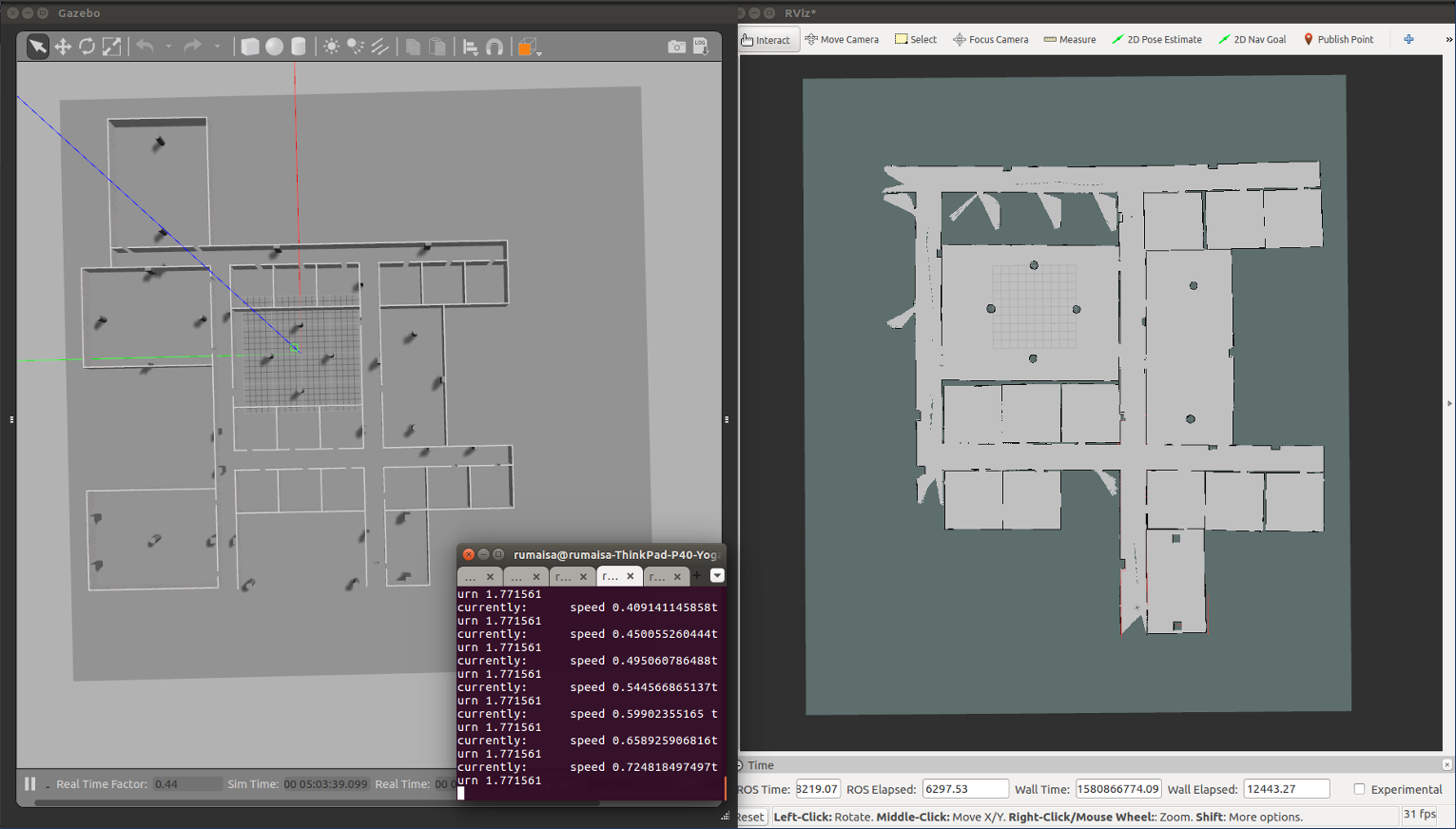
This image shows a snapshot of the mapping process using GMapping and teleop:
This image shows the resulting map created of the complex indoor environment using GMapping and teleop:
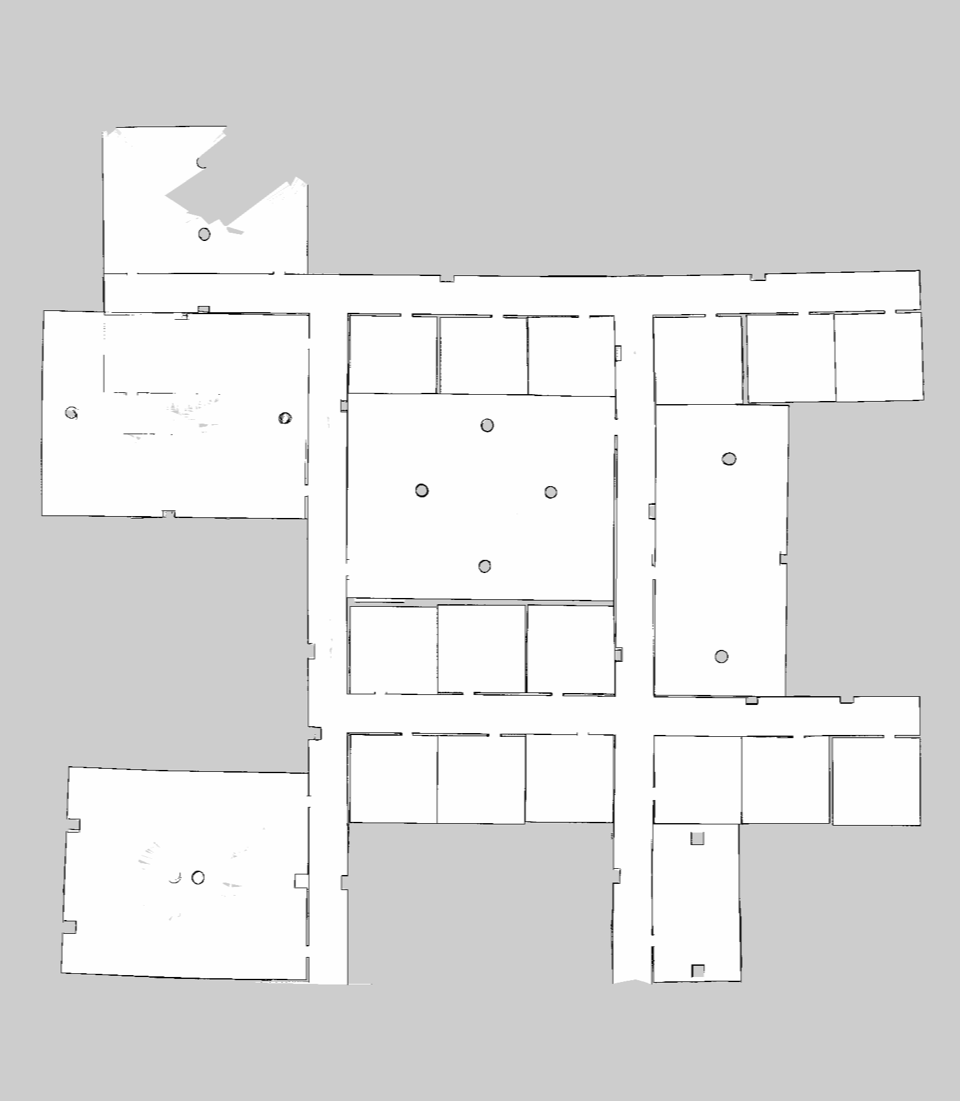
This image shows the resulting map created of the complex indoor environment using GMapping and frontier exploration:
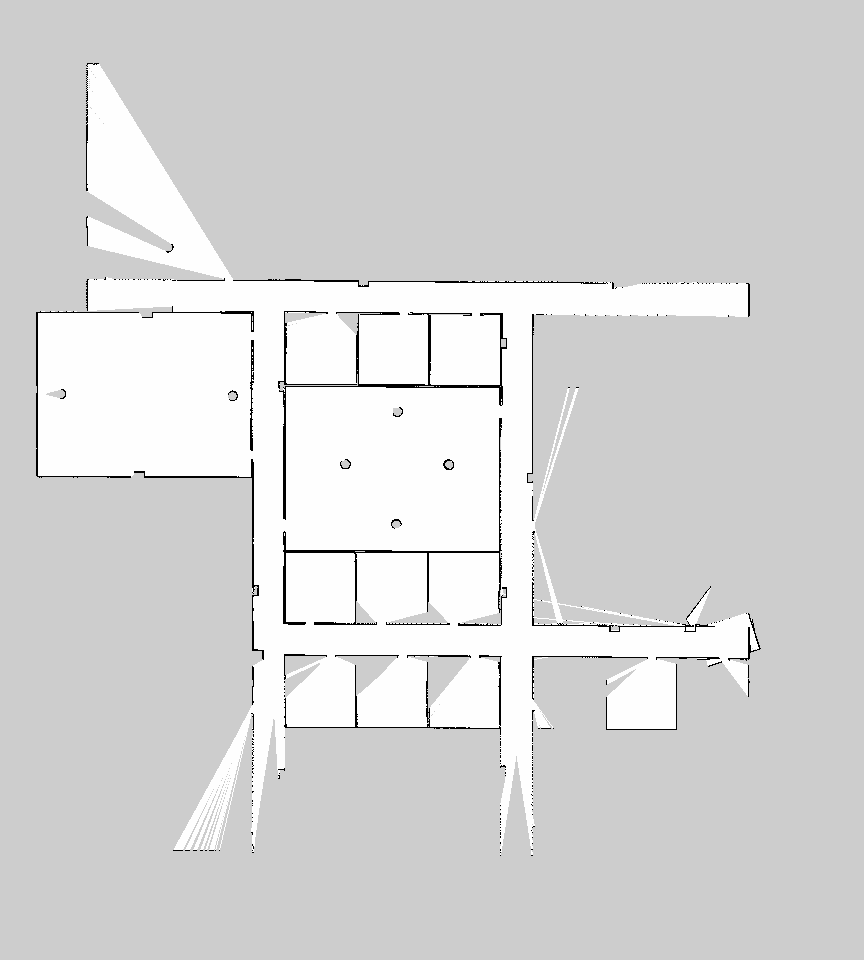
This image shows the resulting map created of the complex indoor environment using Google Cartographer and teleop: